In this tutorial, we use an approach based on OpenCV for the cascade classifier training.
The details about the OpenCV approach can be found
here.
We assume the following directory structure:
/balldetection
pos_top
img1.png
img2.png
...
neg_top
img3.png
img4.png
...
createpos.cpp
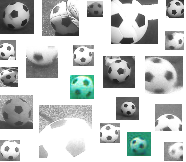
Create the positive training data
All the image patches in the set of positive samples have to be listed in a text file.
This text file should be formatted to adere to the needs of the OpenCV function
opencv_createsamples
You can use the C++ file createpos.cpp to create
a file named "positives.txt" in a format suitable for OpenCV. Use for example
g++ createpos.cpp -o createpos -lws2_32 for compiling it under Windows with MinGW.
The command lists for
creating the text file is:
cd balldetection
createpos pos_top
opencv_createsamples -info positives.txt -w 16 -h 16 -vec pos.vec -num 2728
where
- positives.txt contains the list of the positive patches
that will be used for training the classifier
- w is the width of the search window
- h is the height of the search window
- vec is a vector file of positive samples in the OpenCV format
- num is the total number of positive samples
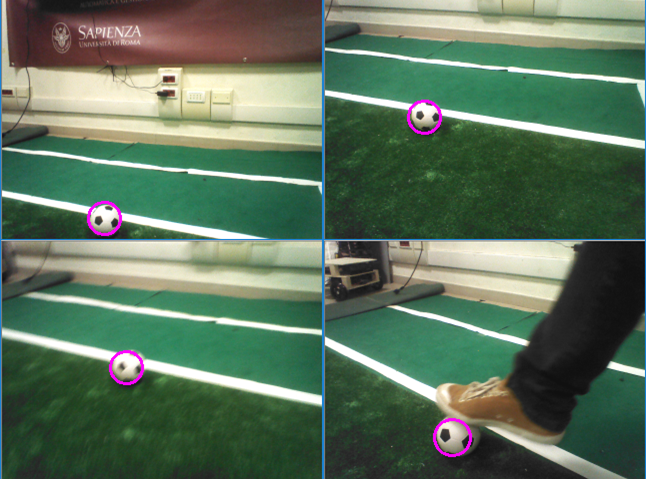
We experimentyally found that 16x16 is a good window size for our application scenario where we wantto find a black and white ball.
If you need to detect a bigger object maybe a bigger window size (e.g, 24x24) could work better, or if you want to detect a
rectangular object (e.g., a banana), then you could decide to use a rectangular window like 60x30.
Once completed the above steps, our directory structure is:
/balldetection
pos_top
neg_top
createpos.cpp
positives.txt
pos.vec
Create the negative training data
All the images in the set of negative samples have to be listed in a text file.
For example, in Windows the command lists for
creating the text file is:
dir /b/s .\neg_top\*.png > negatives.txt
Once completed the above steps, our directory structure is:
/balldetection
pos_top
neg_top
createpos.cpp
positives.txt
pos.vec
negatives.txt
Train the classifier
To train the classifier it is possible to use the OpenCV method opencv_traincascade,
but before we need to create an empty folder named "classifier".
Our directory structure is now:
/balldetection
classifier
pos_top
neg_top
createpos.cpp
positives.txt
pos.vec
negatives.txt
opencv_traincascade -data classifier -vec pos.vec -bg negatives.txt -numStages 20 -minHitRate 0.999
-maxFalseAlarmRate 0.5 -numPos 2728 -numNeg 16000 -w 16 -h 16 -mode ALL -precalcValBufSize 256
-precalcIdxBufSize 256 -acceptanceRatioBreakValue 10e-5 -nonsym -baseFormatSave -featureType LBP
For the meaning of the parameters please refer to the
OpenCV documentation.
It is important to note the use of the parameter nonsym since in the case of the
black and white ball the pattern is not symmetric in all possible views.
An example of a classifier generated with the OpenCV tools is available here.
Two pre-trained classifiers (one for the top and one for the bottom camera) can be downloaded from the
SPQR Team NAO image data set web page.